
知人に使ってもらうために製作を始めた超音波式の
ダスト・レベル・スイッチ/アラームです。
原理はソナー、超音波距離計、魚群探知機などと
同じですがそちらは反射波を見つけること、
一方こちらは「ダストの海」の中で反射波を見失うことが
大きく違うところです(笑)。
左画像のように、超音波の送信/受信ユニットは
ダスト缶の上カバーからパイプでダスト缶の中に突き出して固定され、
コントローラーはパイプの反対側のケースに組み込みます。
パイプは全ネジが切られているので、上カバーからセンサーまでの
距離を可変でき、いろいろなサイズのダスト缶、検出レベルに
対応できるようになっています。
下左は反射物がない時、上は送信波形、一つのパルスのように見えますが横軸(時間軸)拡大すると40KHzのパルス・トレインです。下が受信波形、センサー・ユニット内で超音波の送信波、残響などを拾ってしまうので、センサーとしては横軸二目盛より早く帰ってくる反射波は分離検出できません(それだけ短い距離からの反射)。したがって下向きにセンサーを取り付け溜まったダスト表面での反射を拾う方法は、満杯レベルでは多分距離が短かすぎて実用にならないでしょう?(今は256KHzなんていう超超音波のユニットもあるようですが・・)。右は距離を置いて反射板を置いた場合で、はっきりと反射波が確認できます。
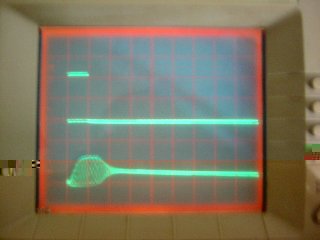
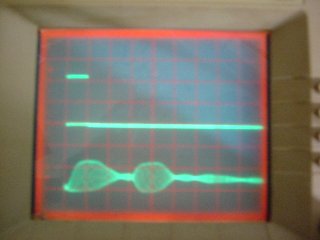
この遅れ時間と音速からソナー・超音波距離計は距離を計算するのですが、ダスト・レベル・スイッチとしては
反射波がなくなる=センサー・ユニットがダストに埋まって検出レベルに達した
という判断をしてLEDなりブザーなりでアラームを出します。センサーは横向きに取り付け、ダスト缶の壁での反射を検出するようにします。使われるダスト缶のサイズはさまざまですが、各サイズに応じて音速から計算した反射所要時間範囲内で満遍なく検出すればこれにも対応できます(ダスト缶のサイズそのものも検出/計算できますが、やりすぎると目的と手段が逆転するので止めときます 笑)。また初代超音波センサーで体験したように、集塵機が動作中などは舞っているダストによって超音波がランダムに遮られるので、PICのプログラムに誤検出を防ぐための機能を持たせます。
パドル式、プロペラ式と比較するとダストの種類を選ばない、機械要素がないのでメンテナンス・フリー、検出レベルの設定など設置が容易、軽量、(安価 パーツ代は3500円程度)などのメリットがありそうです。
2006 April
*この送受信センサーの直径は18mmですが、もっと小さな超音波センサー・ユニット(防滴型)を少量入手可能な方がおられましたら、是非ご一報お願いします。
 コントロール基板と電源をケースに組み込み一号が完成。
コントロール基板と電源をケースに組み込み一号が完成。


